Meine Verssuche das CYD mit Micropython zu betreiben.
Meine ersten Versuche waren noch nicht sehr erfolgreich. Letztendlich war es mir gelungen Das Display zum Leben zu erwecken. Allerdings wurden die Farben als BGR dargestellt, was ich nicht ändern konnte.
Schließlich konnte ich das CYD nicht mehr mit Thonny erreichen und habe Micropython neu installiert. Damit waren dann aber auch alle meine bisherigen Versuche und Änderungen gelöscht.
Nun also ein neuer Anlauf.
Zuerst erstelle ich mal eine Gliederung, das hilft mir strukturierter vorzugehen und bietet die Möglichkeit meiner Ergebnisse gleich an der richtigen Stelle zu dokumentieren – bevor ich wieder MPY neu aufspiele.
Das CYD, Daten, Eigenschaften und Varianten
Micropythonspezifische Informationen zum CYD
Hier meine aktuelle Linksammlung zum Thema:
CYD Links:
Das Display
Ich möchte zuerst das Display benutzen können. Es handelt sich dabei um einen Controller ILI9341.
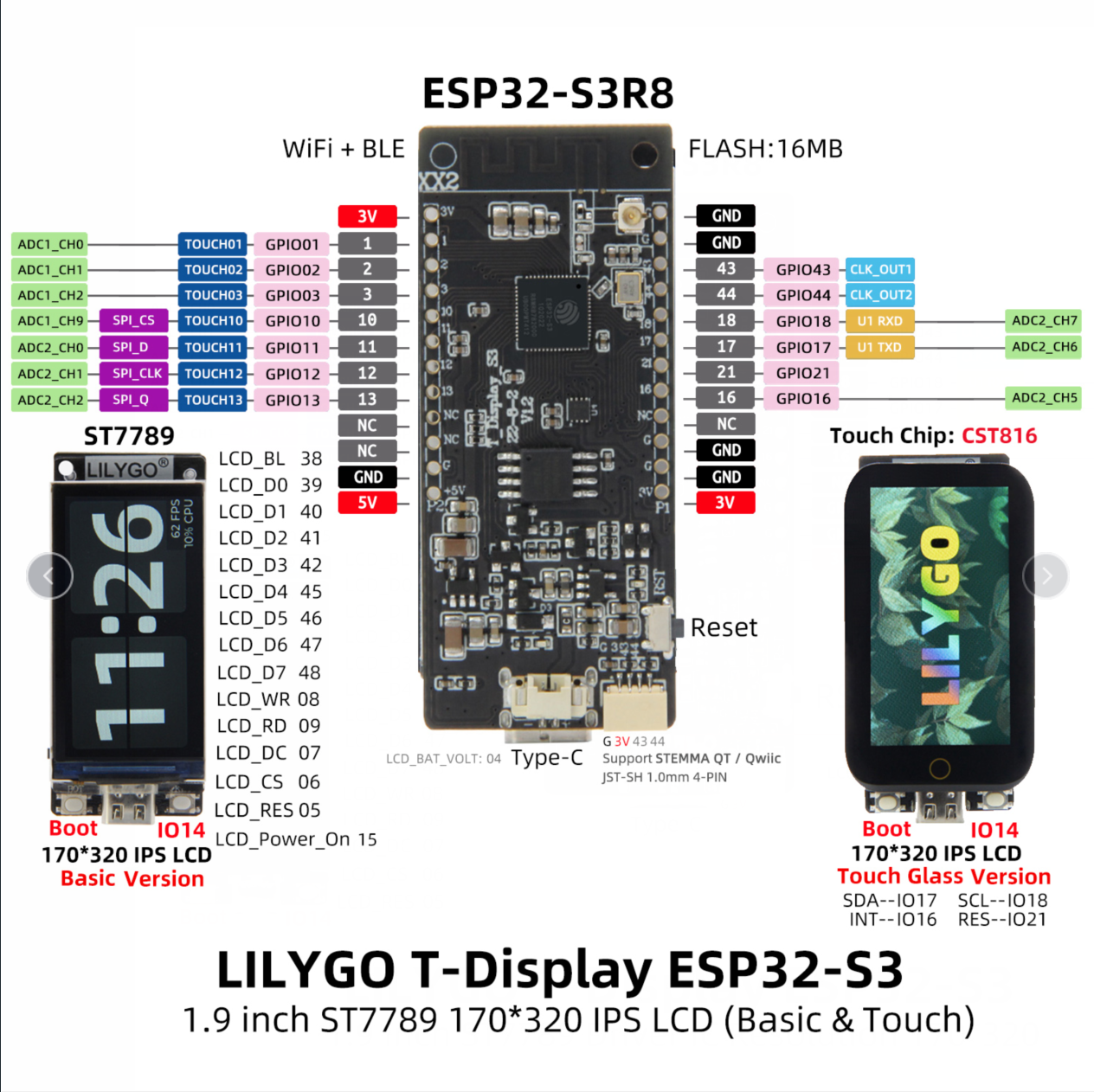
Hier sind die Pinbelegungen des CYD dargestellt. Für das Display ist dort folgendes aufgeführt:
disp = ili9XXX.ili9341(factor=32, double_buffer=False, clk=14, cs=15, dc=2, rst=12, power=23, backlight=21, miso=12, mosi=13,width=320, height=240, backlight_on=1, rot=ili9XXX.LANDSCAPE)
Da dort ein anderer Treiber verwendet wird sind noch weitere Parameter enthalten, die bei dem von mir verwendeten Treiber nicht vorhanden sind.
Ich habe zuerst den ili9341.py Treiber von hier ausprobiert. Ich habe ihn nach /lib auf dem ESP32 kopiert und dann mit dem Demoprogramm demo_fonts8x8_bgcolor.py getestet.
In der Initialisierungssequenz habe ich die Zeile
self.write_cmd(self.INVON) # Ergänzt
hinzugefügt, da ich von meinen ersten Versuchen noch wusste, das das etwas gebracht hat. Es hat sich aber gezeigt, dass die Invertierung falsch war. Siehe weiter unten.
Aber auch damit erschien kein Bild. Deshalb habe ich die Anschlüsse in demo_fonts8x8_bgcolor.py überprüft. Die waren falsch. Hier die Richtigen.
In ili9341.py ist eine falsche Geometrie als Default eingetellt. Deshalb muss hier noch width und hight angegeben werden.
spi = SPI(1, baudrate=40000000, sck=Pin(14), mosi=Pin(13))
display = Display(spi, dc=Pin(2), cs=Pin(15), rst=Pin(12), width=320, height=240)
Auch das zeigte kein Bild. Es fiel mir aber auf, das die Hintergrundbeleuchtung des Displays nicht leuchtete. Deshalb habe ich Pin21 manuell eingeschaltet:
bl = machine.Pin(21, machine.Pin.OUT)
bl.on()
Und siehe da, das Display wurde hell und test() zeigte etwas an!
Nun habe ich die folgenden Zeilen in der REPL eingegeben:
spi = SPI(1, baudrate=40000000, sck=Pin(14), mosi=Pin(13))
display = Display(spi, dc=Pin(2), cs=Pin(15), rst=Pin(12), width=320, height=240)
display.draw_text8x8(100, 120, "sollte Grün sein!", color565(0, 255, 0))
Der Text wurde angezeigt, aber in Lila. Außerdem enthält der Default 8×8 Font kein ü, es wird wohl der aus dem MPY Framebuffer sein.
Da Lila die Komplementärfarbe zu Grün ist war wohl die Invertierung falsch. Nachdem ich diese Zeile auskommentiert hatte wurde der Text auch Grün angezeigt.
Display ON/OFF
In der __init__ Methode von Display in ili9341.py steht in Zeile 171:
self.write_cmd(self.DISPLAY_ON)
Ich hatte angenommen, dass damit das Display eingeschaltet wird. Das passiert auch, aber die Hintergrundbeleuchtung hat damit nichts zu tun! Diese muß extra eingeschaltet werden:
bl = Pin(21, Pin.OUT)
bl.on()
Statt on/off kann man auch einen PWM-Anschluss darauf legen und so die Helligkeit einstellen.
Soweit ist also die grundsätzliche Funktion des Displays hergestellt.
CYDR.py
CYDR.py fasst die Möglichkeiten der Platine in einem Objekt zusammen. Das vereinfacht den Start gewaltig. Jetzt werde ich dieses Modul mal ausprobieren.
Ich habe die Datei cydr.py mit Thonny gestartet (entspricht einem Import). Dann das unten dargestellte Protokoll habe ich anschließend durchgeführt. Die getesteten Methoden habe alle funktioniert!
MicroPython v1.23.0 on 2024-06-02; Generic ESP32 module with ESP32
Type "help()" for more information.
>>> %Run -c $EDITOR_CONTENT
MPY: soft reboot
Booting...
>>> %Run -c $EDITOR_CONTENT
MPY: soft reboot
Booting...
>>> cyd = CYD(rgb_pmw=False, speaker_gain=512, display_width=320, display_height=240, wifi_ssid = None, wifi_password = None)
CYD ready...
>>> cyd.display.draw_text8x8(100, 120, "sollte Grün sein!", color565(0, 255, 0))
>>> cyd.touches()
(0, 0)
>>> cyd.touches()
(245, 113)
>>> cyd.touches()
(236, 279)
>>> cyd.play_tone(1000, 100, gain=0)
>>> cyd.play_tone(1000, 100, gain=0)
>>> cyd.wifi_connect('ssid', 'password')
connecting to network...
network config: 192.168.3.180
>>>
- cyd = CYD(rgb_pmw=False, speaker_gain=512, display_width=240, display_height=320, wifi_ssid = None, wifi_password = None)
- cyd.display.ili9341_cydr_function_name()
- Use to access ili9341_cydr functions.
- OK
- cyd._touch_handler(x, y)
- Called when a touch occurs.
- INTERNAL USE ONLY
- cyd.touches()
- GETS the last touch coordinates.
- OK
- cyd.double_tap(x, y, error_margin = 5)
- cyd.rgb(color)
- cyd._remap(value, in_min, in_max, out_min, out_max)
- Converts a value form one scale to another.
- INTERNAL USE ONLY
- cyd.light()
- GETS the current light sensor value.
- liefert nur 0.0 zurück.
- cyd.button_boot()
- GETS the current boot button value.
- gibt <bound_method> zurück.
- cyd.backlight(value)
- SETS backlight brightness.
- Es geht nur 1 und 0.
- cyd.play_tone(freq, duration, gain=0)
- Plays a tone for a given duration.
- OK
- cyd.mount_sd()
- cyd.unmount_sd()
- Unmounts SD card.
- Failed to unmount SD card
- Laufwerk sd lässt sich nicht unmounten.
- cyd.wifi_connect(ssid, password)
- Connects to a WLAN network.
- OK
- cyd.wifi_isconnected()
- Checks to see that the wifi connection is connected.
- OK
- cyd.wifi_ip()
- Get the CYD’s IPv4 address on your WLAN.
- OK
- cyd.wifi_create_ap(_ssid)
- Creates an Access Point (AP) WLAN network.
- ?
- cyd.shutdown()
- Safely shutdown CYD device
- Failed to unmount SD card
- display off
- ========== Goodbye ==========
- Micropython steht in der REPL weiterhin zur Verfügung.
TODO
- Backlight ein- und ausschalten in backlight_on() und backlight_off() integrieren.
Neueste Kommentare